
Sensor Fusion Algorithms
The aim of this project is to develop novel multi-sensor fusion models, which combines wearable sensing data (accelerometer, gyroscope, and magnetometer) to compute clinically important human kinematics during dynamic movement. We initially focus on accurate sensing during gait for foot progression angle (relevant to knee loading for knee osteoarthritis) and trunk sway angle (relevant to walking stability).
One primary problem with the current kinematic estimation algorithms is that gravity and magnetic field vectors are measured in the earth’s reference frame, but gait kinematics must be expressed in the human body reference frame. Thus, a static trial is typically performed prior to the walking trial to align the earth reference frame with the body reference frame. However, this only works when the human body reference frame and the earth reference frame do not change with respect to each other during the entire walking trial. Current research involving wearable kinematic sensing is confined to conditions of straight line walking and doesn’t allow humans to change walking direction. However, in real life walking situations, humans are constantly turning and changing walking directions.
Thus, research will be performed to form a model to compute human gait kinematics in real-time when changing walking directions based on multiple wearable sensors attached to multiple body segments. First, develop sensor fusion algorithms to combine accelerometer, gyroscope, and magnetometer signals to accurately estimate each body segment at the location of the sensors, which includes solving the drift problem of integrating gyroscope angular velocities, the environment magnetic noise problem of magnetometers not always measuring true magnetic north pole, and the unwanted accelerations problems of accelerometers. Second, combine individual body segment orientations to compute anatomical gait kinematics, which involves solving the problem of inaccurate sensor placement on the body. Third, project all gait kinematics into the reference frame of the human to ensure they are still valid after changing walking directions. Accelerometer, gyroscope and magnetometer data will be fused together, integrated, and Gradient decent, Kalman, and custom filters applied to estimate kinematics. Vicon, marker-based motion capture system is used to validate measurements accuracy.

Foot Progression Angle Estimation
Accelerometer, gyroscope, and magnetometer data fusion from the miniaturized sensor to estimate foot progression angle regardless of walking direction.
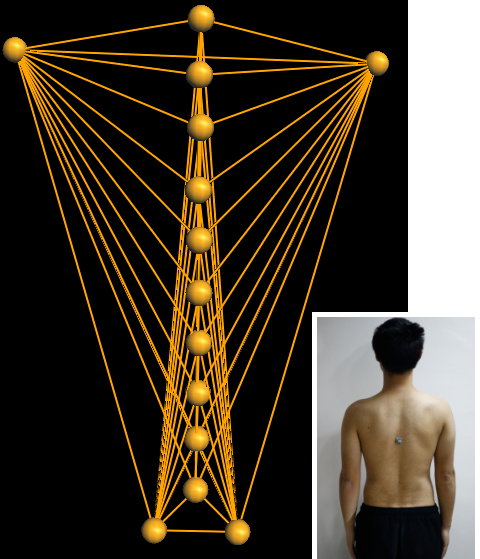
Trunk Sway Angle Estimation
Accelerometer and gyroscope sensor fusion to estimate medial-lateral trunk sway angle from the miniaturized sensor during walking and running gait.