
Stretchable Sensors
Existing wearable devices are typically hard, manufactured with techniques for rigid consumer electronics like smart phones, and are thus often not well suited for use on human skin, which is soft and elastic. We focus on developing elastic substrates which closely match human skin properties. Electronics, sensors, actuators, and wires are embedded in elastic substrates as part of the design process. Soft robotic sensing devices contain accelerometers, gyroscopes, and magnetometers, and haptic devices contain small vibration motors for haptic vibration feedback.
Design and fabrication of elastic substrates for electronic sensing and feedback devices are challenging due to the inherent properties of flexible/elastic materials. Specific challenges include susceptibility to micro cracks during the deposition process and the potential for buckling and wrinkling of rigid thin films on elastic substrates. Additionally, adhesion of deposited metal on elastic substrates can be challenging given the mismatch in thermal coefficients between the two materials.
Lithography and electroforming are critical to the fabrication process. First a layer of PDMS is coated on a rigid glass base. This is followed by seed layer deposition and the use of lithography to form a resist layer to define the circuit structure. Electroforming is then used to make the gold metal conductive circuit. The resist layer is then removed and the seed layer etched. The sensors, microcontroller, battery, and other necessary electronic components are then soldered to the circuit substrate to complete the device packaging. Finally, the glass base is released leaving only the elastic substrate.
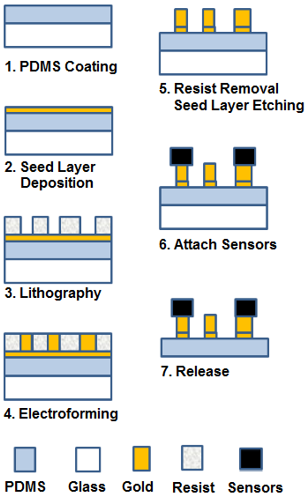
Fabrication
Manufacturing soft sensor and feedback devices on an elastic substrate
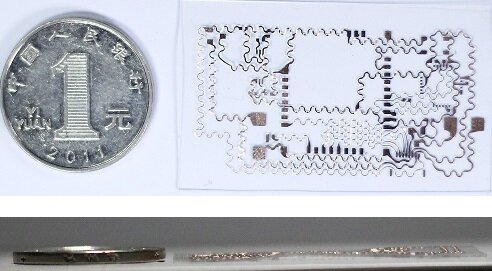
Substrate
Elastic substrate is 0.5 mm thick
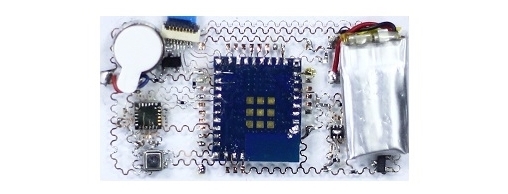
Prototype
Elastic substrate with MCU, Zigbee wireless, 3-axis accelerometer, 3-axis gyroscope, 3-axis magnetometer, battery, power regulator, and vibration motor